diffusion rec
September 10, 2024
C X

Camille X
Robotic Imitation Learning Methods
1 / 6 Parts
diffusion policy.
Series
data
command and state
kuavo_traj_q_v_tua
policy
module
robot env
Chat with HW
experience
事务
Idea
- 图像的归一化能否和state一样在图像之间归一化,而不是自己归一化?
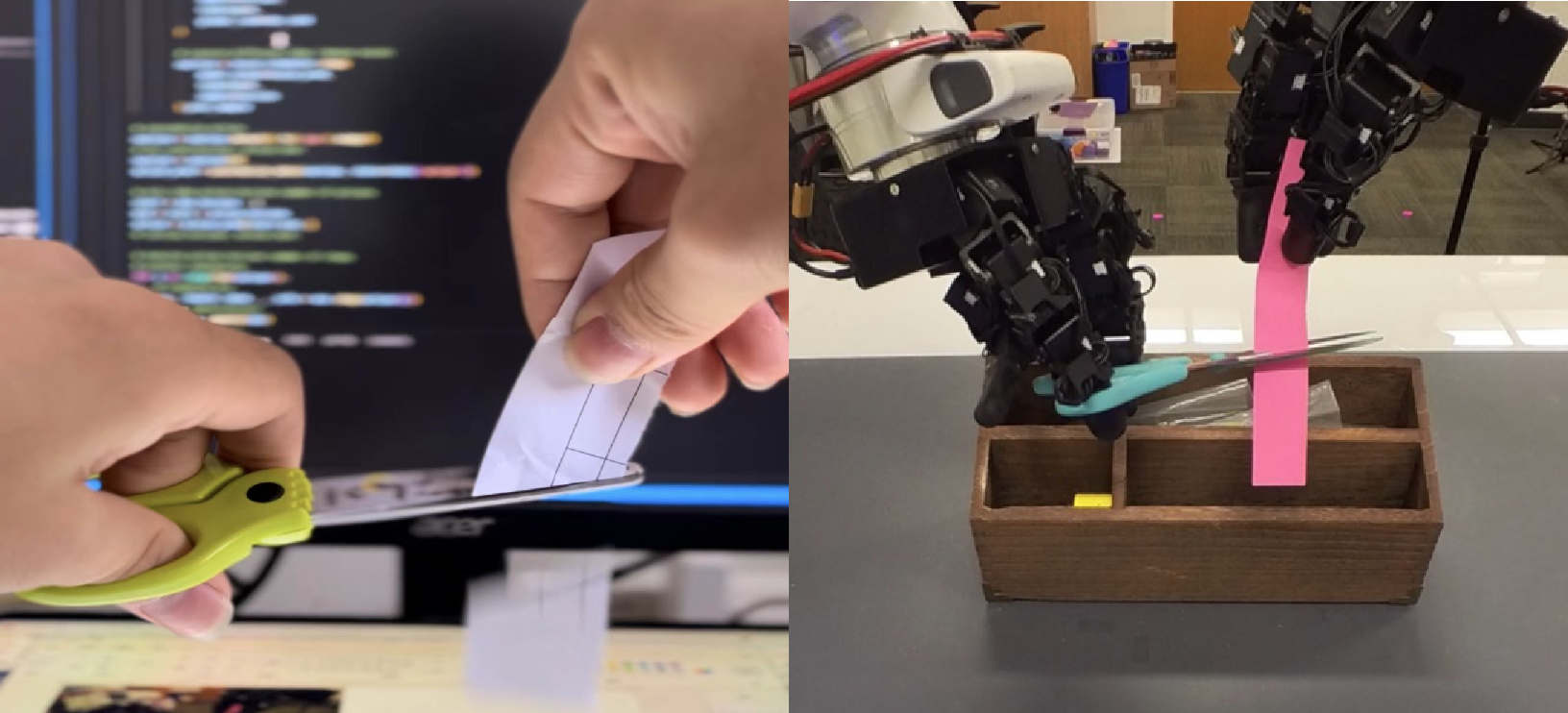
what matters in robot imitation learning ?
diffuision scheduler and predict_net is 解耦
directly use data or use latent of data
some acknowledges about nn.parameters()
a model archtecture picture about diffusion policy
details about imitation learning data flow in training
naive bayes 在对两个高斯分布时,naive bayes 是logistic回归的特殊情况
什么是自归回
nn.Conv1d(in_channels, out_channels, kernel_size, stride, padding), nn.Conv2d, nn.Linear(),
Conditional Denoise:
- VAE IL, DIFFUSION IL, BC_RNN IL , (octo IL)?
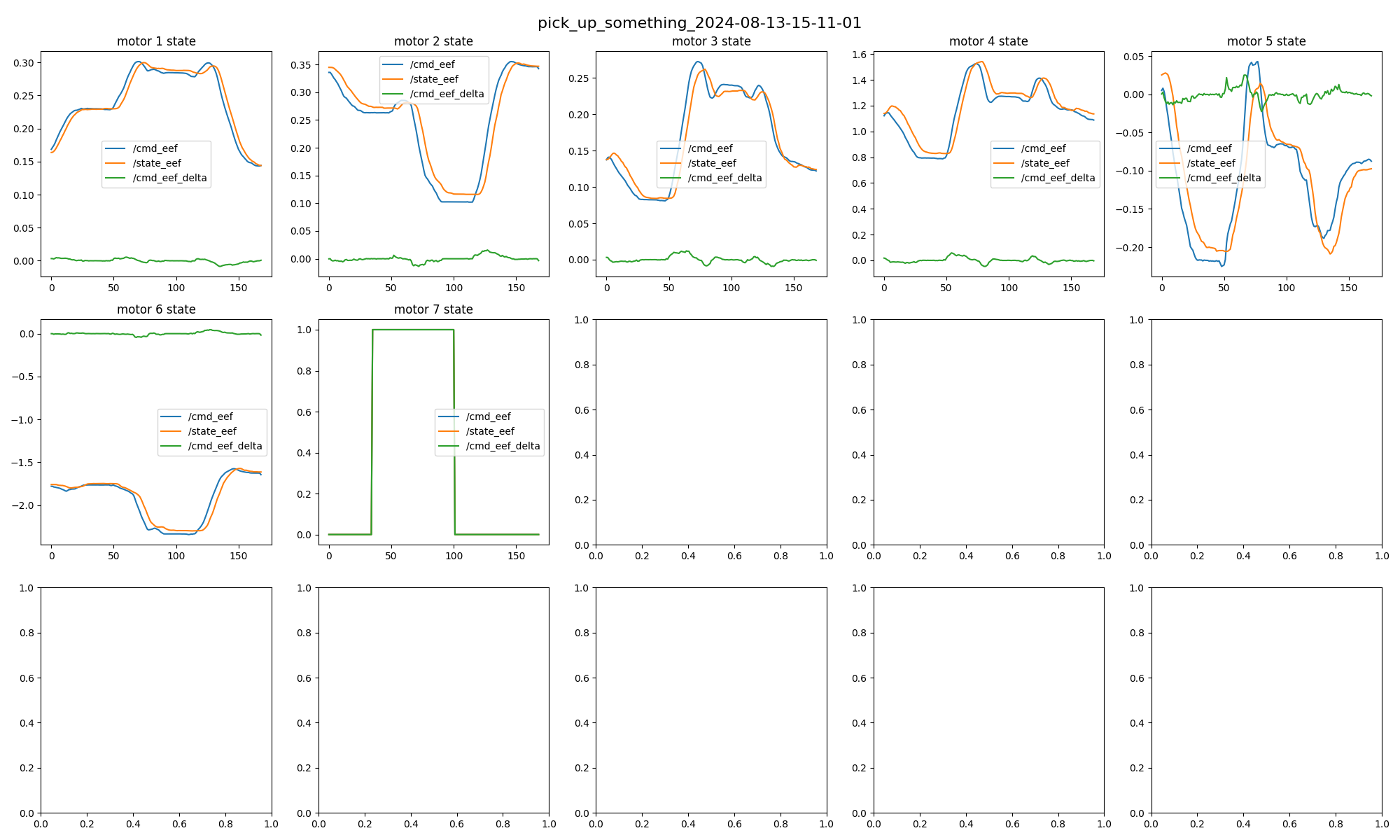
关于部署端延迟以及模型预测时间的覆盖
条件:
- 机器人数据的处理后频率为: 10Hz
- 模型预测时间约为: 0.13s
设计
- 机器人轨迹设计为:1-100step, 时间为10s(10Hz)